
· Hakan Çelik · OpenCV / Camera Calibration · 2 dk
Depth Map from Stereo Images
Learn to create a depth map from stereo images. We cover cv.StereoBM.create() for disparity map computation and the parameters for tuning the results.
Articles on Python, Django, OpenCV, Cloud, and more.
Learn to create a depth map from stereo images. We cover cv.StereoBM.create() for disparity map computation and the parameters for tuning the results.

If you need more information about what clickjacking is, how to protect against it, and what precautions to take, you can check out my list titled clickjacking.
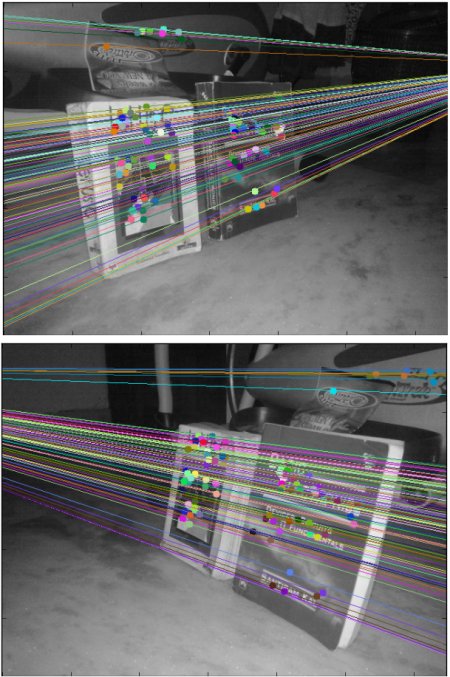
Learn the basics of multiview geometry. We cover epipole, epipolar lines, epipolar constraint, Fundamental Matrix and Essential Matrix, with OpenCV code to find and draw epilines.
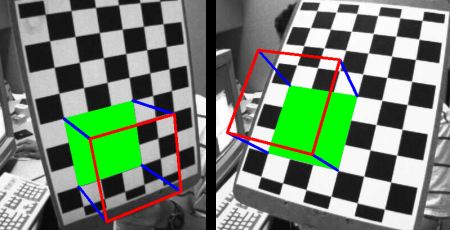
Learn to exploit the calib3d module to create 3D effects in images. We cover cv.solvePnP() and cv.projectPoints() to draw 3D coordinate axes and a cube on a chessboard.
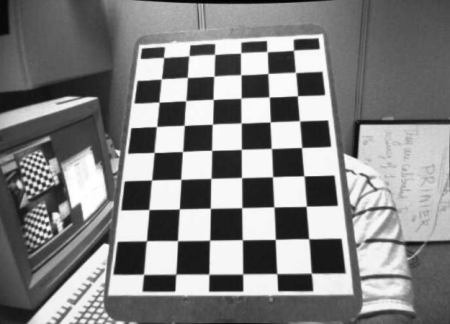
Learn about types of distortion caused by cameras and how to find intrinsic/extrinsic properties. We cover cv.calibrateCamera() and cv.undistort() using a chessboard pattern.
Learn background subtraction techniques to detect moving objects in video streams. We cover cv.createBackgroundSubtractorMOG2() and KNN-based background subtraction.
Learn optical flow using Lucas-Kanade and Farneback methods. We cover cv.calcOpticalFlowPyrLK() for sparse and cv.calcOpticalFlowFarneback() for dense optical flow.

Learn to use Meanshift and Camshift algorithms for object tracking in video. We cover cv.meanShift() and cv.CamShift() for histogram-based object tracking.
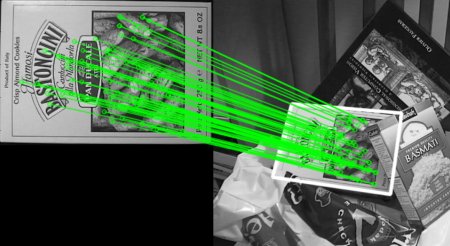
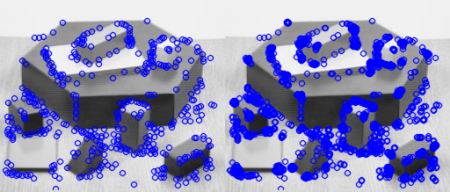
Learn to combine feature matching and findHomography from the calib3d module to find known objects in complex images. We cover RANSAC-based robust perspective transform estimation.