· Hakan Çelik · OpenCV / Görüntü İşleme · 4 dk okuma
Görüntüyü Yumuşatma - ( Smoothing Images )
OpenCV Serisi 8/64
- 1. Boya Fırçası Olarak Fare
- 2. Canny Kenar Algılama
- 3. Görüntü Geçişleri
- 4. Görüntü Piramitleri
- 5. Görüntülerde Aritmetik İşlemler
- 6. Görüntülerle İlgili Temel İşlemler
- 7. Görüntünün Geometrik Dönüşümleri
- 8. Görüntüyü Yumuşatma - ( Smoothing Images )
- 9. Histogramlar
- 10. Konturler ( Contours )
- 11. Morfolojik Dönüşümler
- 12. Opencv Nedir Ve Kurulumu
- 13. Opencv Resim Işlemleri
- 14. Opencv Video Işlemleri
- 15. Opencv'de Çizim Fonksiyonları
- 16. Performans Ölçüm Ve Geliştirme Teknikleri
- 17. Renk Alanlarını Değiştirme
- 18. Renk Paleti Olarak Parça Çubuğu ( Trackbar )
- 19. Resim Eşikleme
- 20. Şablon Eşleştirme
- 21. Hough Doğru Dönüşümü
- 22. Hough Daire Dönüşümü
- 23. Fourier Dönüşümü
- 24. Histogram Eşitleme
- 25. 2B Histogramlar
- 26. Histogram Geri Projeksiyonu
- 27. Kontur Özellikleri
- 28. Kontur Nitelikleri
- 29. Konturlerle Daha Fazla İşlev
- 30. Kontur Hiyerarşisi
- 31. GrabCut ile Etkileşimli Ön Plan Çıkarma
- 32. Watershed Algoritması ile Görüntü Segmentasyonu
- 33. Özellikleri Anlamak
- 34. Harris Köşe Tespiti
- 35. Shi-Tomasi Köşe Dedektörü ve İzlenecek İyi Özellikler
- 36. SIFT'e Giriş (Ölçek Değişmez Özellik Dönüşümü)
- 37. SURF'e Giriş (Hızlandırılmış Sağlam Özellikler)
- 38. Köşe Tespiti için FAST Algoritması
- 39. BRIEF — İkili Sağlam Bağımsız Temel Özellikler
- 40. ORB (Yönlü FAST ve Döndürülmüş BRIEF)
- 41. Özellik Eşleştirme
- 42. Özellik Eşleştirme + Nesneleri Bulmak için Homografi
- 43. Meanshift ve Camshift ile Nesne Takibi
- 44. Optik Akış
- 45. Arka Plan Çıkarma
- 46. Kamera Kalibrasyonu
- 47. Poz Tahmini
- 48. Epipolar Geometri
- 49. Stereo Görüntülerden Derinlik Haritası
- 50. k-En Yakın Komşuyu Anlamak
- 51. kNN ile El Yazısı OCR
- 52. SVM'yi Anlamak
- 53. SVM ile El Yazısı OCR
- 54. K-Ortalamalar Kümeleme'yi Anlamak
- 55. OpenCV'de K-Ortalamalar Kümeleme
- 56. Görüntü Gürültü Giderme
- 57. Görüntü Onarımı (Inpainting)
- 58. Yüksek Dinamik Aralık (HDR) Görüntüleme
- 59. Haar Cascade ile Yüz Tespiti
- 60. pip ile OpenCV Kurulumu
- 61. Ubuntu'da OpenCV-Python Kurulumu
- 62. Fedora'da OpenCV-Python Kurulumu
- 63. Windows'ta OpenCV-Python Kurulumu
- 64. OpenCV-Python Bağlayıcıları Nasıl Çalışır?
Görüntüyü Yumuşatma - ( Smoothing Images )
Smoothing Images olarak geçer.
Hedefler
- Çeşitli düşük geçişli filtrelerle görüntüleri bulanıklaştırma
- Görüntülere özel filitreler uygulamak (2B kıvrım)
2D Kıvrım ( Resim Filtreleme )
Tek boyutlu sinyaller olarak, çeşitli düşük geçişli (LPF) filtreler ile resimler ayrıca filtrelenebilir, yüksek geçişli filtreler (HPF) vs. Bir LPF gürültünün giderilmesinde yardım eder veya resmi bulanıklaştırmada. HPF ise resimlerdeki kenarları bulmada yardım eder.
Bir resim ile çekirdeği ( kernel ) çevirmek, evirmek vs için OpenCV kütüphanesinde cv2.filter2D() fonksiyonunu vardır. Örnekte görüldüğü gibi, biz resim üzerinde ortalama filtre deniyoruz. 5x5 ortalama bir filtre çekirdeği bu şekilde tanımlanabilir.
Yukarıdaki çekirdek ile filtreleme, aşağıdakilerin gerçekleştirilmesine neden olur. Her bir pixel, 5x5 bu pixel’in üzerinde ekran ordalıdır, bu pencerenin içine giren bütün pixel’ler toplanır ve bunun sonucunda 25’e bölünür.Bu, o pencere içindeki piksel değerlerinin ortalamasının hesaplanmasına denktir. Bu işlem çıktı filtrelenmiş görüntüyü üretmek için görüntünün tüm pikselleri için gerçekleştirilir. Bu kodu deneyin ve sonucunu kontrol edin:
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('opencv_logo.png')
kernel = np.ones((5,5),np.float32)/25
dst = cv2.filter2D(img,-1,kernel)
plt.subplot(121),plt.imshow(img),plt.title('Original')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(dst),plt.title('Averaging')
plt.xticks([]), plt.yticks([])
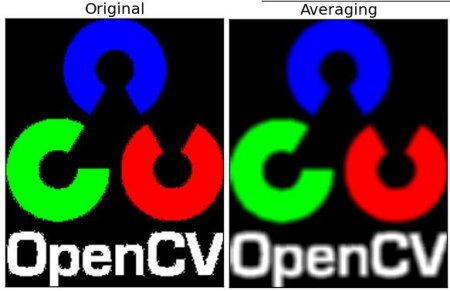
plt.show()Sonuç;
Resim Bulanıklaştırma ( Görüntü Yumuşatma )
Görüntü bulanıklaştırma düşük geçişli filtreler ile resmi evriştirilerek yapılır.Bu görüntü kirliliğini kaldırmak için iyi bir yöntemdir.Aslında yüksek frekanslı içeriği (ör. Gürültü, kenar) görüntüden kaldırır ve böylece filtre uygulandığında kenarları bulanık hale getirir.OpenCV, esas olarak dört tür bulanıklaştırma tekniği sunar.
1. Averaging ( Ortalama )
Bu normalize edilmiş kutu filtresi ile resmin evriştirilmesi sonuçu yapılır. Çekirdek alanı altındaki tüm piksellerin ortalamasını alır ve merkezi öğeyi bu ortalama ile değiştirir. Bu olay OpenCV de ki cv2.blur() ve cv2.boxFilter() fonksiyonları ile yapılır.Çekirdek hakkında daha fazla bilgi edinmek için, çekirdeğin genişlik ve yüksekliğini belirlemeliyiz 3x3 normalize edilmiş bir kutu filtresi şuna benzer:
NOT; Eğer normalize edilmesin istiyorsanız cv2.boxFilter(normalize = False ) demeniz yeterli oluyor.
import cv2
import numpy as np
from matplotlib import pyplot as plt
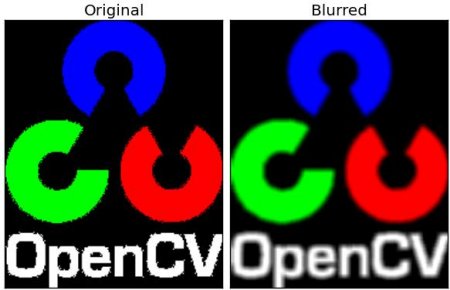
img = cv2.imread('opencv_logo.png') # resmi okuduk
blur = cv2.blur(img,(5,5)) # blur filtresi uyguladık
# ve oluşan orjinal ve yeni görüntüyü matplotlib kullanarak ekrana verdik
plt.subplot(121),plt.imshow(img),plt.title('Original')
plt.xticks([]), plt.yticks([])
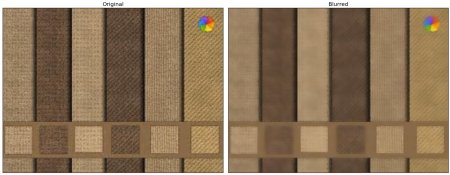
plt.subplot(122),plt.imshow(blur),plt.title('Blurred')
plt.xticks([]), plt.yticks([])
plt.show()Sonuç;
2. Gauss Filtreleme
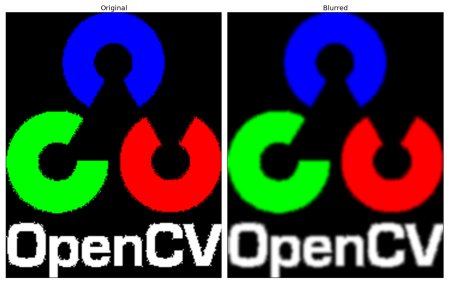
Bu yaklaşım eşit filtre katsayılarından oluşan bir kutu filtresi yerine, bir gauss çekirdeği kullanır bu işlem cv2.GaussianBlur() fonksiyonu kullanılarak yapılır.Tek ve pozitif olan çekirdeğin yükseklik ve genişliğini belirlemeliyiz. Standart sapmayı da sırasıyla X ve Y yönlerinde, sigmaX ve sigmaY olarak belirtmeliyiz. Yalnızca sigmaX belirtilirse, sigmaY sigmaX’e eşit olarak alınır. Her ikisi de sıfır olarak verilirse, bunlar çekirdek boyutundan hesaplanır. Gauss filtrelemesi, görüntüdeki Gauss gürültüsünü gidermede oldukça etkilidir. Bu işlemi yapmak için cv2.getGaussianKernel(). fonksiyonunu kullanmalısınız. Yukarda verdiğimiz kodun ilgili yerini sadece bununla değiştirerek yapılabilir
blur = cv2.GaussianBlur(img,(5,5),0)
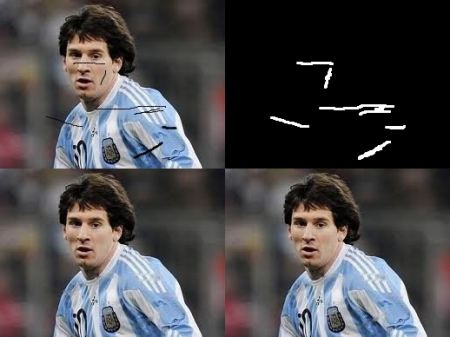
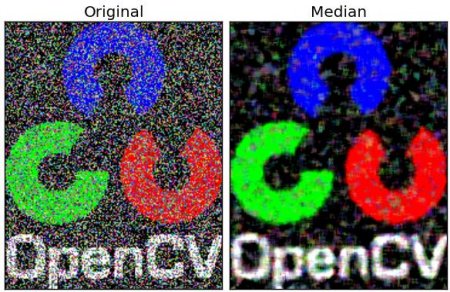
3. Medyan ( Ortanca ) Filtreleme
Burada, cv2.medianBlur() fonksiyonu çekirdek penceresinin altındaki tüm piksellerin ortanca değerini hesaplar ve orta piksel bu orta değerle değiştirilir. Bu, tuz ve biber gürültüsünü gidermede son derece etkilidir. Dikkat çekilmesi gereken ilginç bir nokta, Gauss ve kutu filtrelerinde, merkezi öğe için filtrelenmiş değer, orijinal resimde bulunmayan bir değer olabilir. Bununla birlikte, medyan filtrelemede bu geçerli değildir, çünkü merkezi öğe daima görüntüdeki bazı piksel değerleri ile değiştirilir. Bu, gürültüyü etkili bir şekilde azaltır. Çekirdek boyutu pozitif tek sayıyla olmalıdır.
Bu demoda, orijinal resmimize % 50 gürültü ekliyoruz ve bir medyan filtre kullanıyoruz. Sonucu kontrol edin:
median = cv2.medianBlur(img,5)
4. Bilateral Filtreleme
Not ettiğimiz gibi daha önce gösterdiğimiz filtrelerin kenarlarını bulanıklaştırma olaylarında. Kenarları korurken gürültünün giderilmesinde oldukça etkili olan ikili filtre cv2.bilateralFilter() için durum böyle değildir. fakat bu işlem, diğerlerine göre daha yavaş çalışır.
Zaten bir Gauss filtresinin pikselin çevresini aldığını ve Gauss ağırlıklı ortalamasını bulduğunu gördük. Bu Gauss filtresi yalnızca alanın bir fonksiyonudur; diğer bir deyişle, filtreleme sırasında yakındaki pikseller dikkate alınır. Piksellerin hemen hemen aynı yoğunluk değerine sahip olup olmadığına bakmaz ve pikselin bir kenar üzerinde olup olmadığını düşünmez. Ortaya çıkan sonuç, Gauss filtrelerinin kenarları bulanıklaştırma eğiliminde olmasıdır, bu istenmeyen bir durumdur.
Bilateral filtre aynı zamanda uzay alanında bir Gauss filtresi kullanır, ancak piksel yoğunluğu farklılıklarının bir fonksiyonu olan bir tane daha (çarpımsal) Gauss filtre bileşenini kullanır. Uzayın Gauss fonksiyonu, yoğunluk alanına uygulanan Gauss bileşeni (yoğunluk farklılıklarının bir Gauss fonksiyonu) yalnızca piksellerin ‘filtreleme için’ uzaysal komşular ‘olarak düşünülmesini sağlarken, yoğunluk farklılıklarının bir Gauss fonksiyonu, sadece merkeze benzer yoğunluklara sahip olan piksellerin bulanık yoğunluk değerini hesaplamak için piksel (‘yoğunluklu komşular’) dahil edilmiştir. Sonuç olarak, bu yöntem kenarları korur, çünkü kenarların yakınında bulunan pikseller için kenarın diğer tarafına yerleştirilen komşu pikseller ve bu nedenle merkez pikselle karşılaştırıldığında büyük yoğunluk değişiklikleri sergilemek bulanıklaştırma için dahil edilmez.
Aşağıdaki örnek bilateral filtrelemeyi göstermektedir (argümanlar hakkında ayrıntılı bilgi için OpenCV dokümanlarına bakın).
blur = cv2.bilateralFilter(img,9,75,75)
Sonuç;