· Hakan Çelik · OpenCV / Görüntü İşleme · 3 dk okuma
Watershed Algoritması ile Görüntü Segmentasyonu
OpenCV Serisi 32/64
- 1. Boya Fırçası Olarak Fare
- 2. Canny Kenar Algılama
- 3. Görüntü Geçişleri
- 4. Görüntü Piramitleri
- 5. Görüntülerde Aritmetik İşlemler
- 6. Görüntülerle İlgili Temel İşlemler
- 7. Görüntünün Geometrik Dönüşümleri
- 8. Görüntüyü Yumuşatma - ( Smoothing Images )
- 9. Histogramlar
- 10. Konturler ( Contours )
- 11. Morfolojik Dönüşümler
- 12. Opencv Nedir Ve Kurulumu
- 13. Opencv Resim Işlemleri
- 14. Opencv Video Işlemleri
- 15. Opencv'de Çizim Fonksiyonları
- 16. Performans Ölçüm Ve Geliştirme Teknikleri
- 17. Renk Alanlarını Değiştirme
- 18. Renk Paleti Olarak Parça Çubuğu ( Trackbar )
- 19. Resim Eşikleme
- 20. Şablon Eşleştirme
- 21. Hough Doğru Dönüşümü
- 22. Hough Daire Dönüşümü
- 23. Fourier Dönüşümü
- 24. Histogram Eşitleme
- 25. 2B Histogramlar
- 26. Histogram Geri Projeksiyonu
- 27. Kontur Özellikleri
- 28. Kontur Nitelikleri
- 29. Konturlerle Daha Fazla İşlev
- 30. Kontur Hiyerarşisi
- 31. GrabCut ile Etkileşimli Ön Plan Çıkarma
- 32. Watershed Algoritması ile Görüntü Segmentasyonu
- 33. Özellikleri Anlamak
- 34. Harris Köşe Tespiti
- 35. Shi-Tomasi Köşe Dedektörü ve İzlenecek İyi Özellikler
- 36. SIFT'e Giriş (Ölçek Değişmez Özellik Dönüşümü)
- 37. SURF'e Giriş (Hızlandırılmış Sağlam Özellikler)
- 38. Köşe Tespiti için FAST Algoritması
- 39. BRIEF — İkili Sağlam Bağımsız Temel Özellikler
- 40. ORB (Yönlü FAST ve Döndürülmüş BRIEF)
- 41. Özellik Eşleştirme
- 42. Özellik Eşleştirme + Nesneleri Bulmak için Homografi
- 43. Meanshift ve Camshift ile Nesne Takibi
- 44. Optik Akış
- 45. Arka Plan Çıkarma
- 46. Kamera Kalibrasyonu
- 47. Poz Tahmini
- 48. Epipolar Geometri
- 49. Stereo Görüntülerden Derinlik Haritası
- 50. k-En Yakın Komşuyu Anlamak
- 51. kNN ile El Yazısı OCR
- 52. SVM'yi Anlamak
- 53. SVM ile El Yazısı OCR
- 54. K-Ortalamalar Kümeleme'yi Anlamak
- 55. OpenCV'de K-Ortalamalar Kümeleme
- 56. Görüntü Gürültü Giderme
- 57. Görüntü Onarımı (Inpainting)
- 58. Yüksek Dinamik Aralık (HDR) Görüntüleme
- 59. Haar Cascade ile Yüz Tespiti
- 60. pip ile OpenCV Kurulumu
- 61. Ubuntu'da OpenCV-Python Kurulumu
- 62. Fedora'da OpenCV-Python Kurulumu
- 63. Windows'ta OpenCV-Python Kurulumu
- 64. OpenCV-Python Bağlayıcıları Nasıl Çalışır?
Watershed Algoritması ile Görüntü Segmentasyonu
Hedefler
Bu bölümde:
- İşaretçi tabanlı görüntü segmentasyonu için Watershed algoritmasını öğreneceğiz
- cv.watershed() fonksiyonunu göreceğiz
Teori
Her gri tonlamalı görüntü, yüksek yoğunluğun tepe ve tepeleri, düşük yoğunluğun ise vadileri temsil ettiği bir topografik yüzey olarak görülebilir. Her izole vadiyi (yerel minimum) farklı renkli suyla (etiketlerle) doldurmaya başlarsınız. Su yükseldikçe, yakındaki zirvelere (gradyanlara) bağlı olarak, farklı renklerle farklı vadilerden gelen sular birleşmeye başlar. Bunu önlemek için suların birleştiği yerlere bariyerler inşa edersiniz. Tüm tepeler suyun altına girinceye kadar su doldurmaya ve bariyer inşa etmeye devam edersiniz. Oluşturduğunuz bariyerler segmentasyon sonucunu verir. Watershed’in arkasındaki “felsefe” budur.
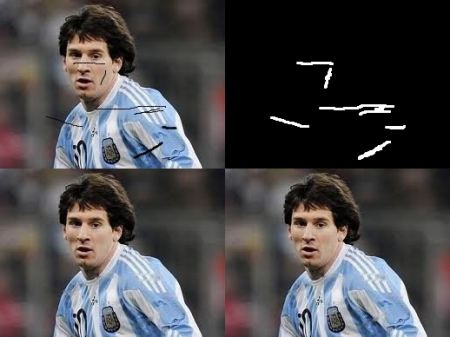
Ancak bu yaklaşım, görüntüdeki gürültü veya diğer düzensizlikler nedeniyle aşırı segmentlenmiş bir sonuç verir. Bu nedenle OpenCV, hangi vadi noktalarının birleştirilip hangilerinin birleştirilmeyeceğini belirttiğiniz işaretçi tabanlı bir Watershed algoritması uygulamıştır. Bu etkileşimli bir görüntü segmentasyonudur. Bildiğimiz nesneye farklı etiketler veririz: Kesinlikle ön plan veya nesne olduğundan emin olduğumuz bölgeyi bir renkle (veya yoğunlukla), kesinlikle arka plan veya nesne olmadığından emin olduğumuz bölgeyi başka bir renkle etiketleriz ve son olarak hiçbir şeyden emin olmadığımız bölgeyi 0 ile etiketleriz. İşte bu bizim işaretçimizdir. Ardından Watershed algoritmasını uygularız. İşaretçimiz, verdiğimiz etiketlerle güncellenir ve nesnelerin sınırları -1 değerini alır.
Kod
Aşağıda, birbirine dokunan nesneleri segmentlemek için Mesafe Dönüşümünü Watershed ile birlikte kullanma örneği göreceğiz.
Aşağıdaki madeni para görüntüsünü düşünün; paralar birbirine dokunuyor. Eşikleme yapılsa bile birbirine dokunmaya devam edecekler:

Paraların yaklaşık tahminini bulmakla başlıyoruz. Bunun için Otsu’nun ikilileştirmesini kullanabiliriz:
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
img = cv.imread('coins.png')
assert img is not None, "file could not be read, check with os.path.exists()"
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
ret, thresh = cv.threshold(gray, 0, 255, cv.THRESH_BINARY_INV + cv.THRESH_OTSU)Sonuç:
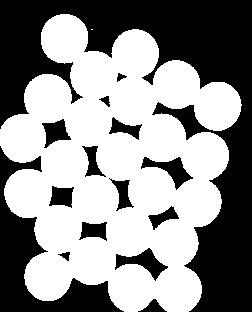
Şimdi görüntüdeki küçük beyaz gürültüleri kaldırmamız gerekiyor. Bunun için morfolojik açma işlemi kullanabiliriz. Nesnedeki küçük delikleri kaldırmak için morfolojik kapama kullanabiliriz. Artık nesnelerin merkezine yakın bölgelerin ön plan, nesneden çok uzak bölgelerin ise arka plan olduğundan eminiz. Tek emin olamadığımız bölge paraların sınır bölgesidir.
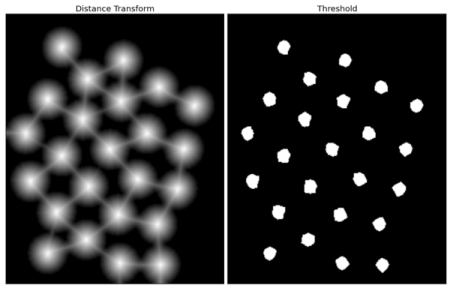
Bu nedenle kesinlikle para oldukları alanı çıkarmamız gerekiyor. Erozyon, sınır piksellerini kaldırır. Yani kalan her şeyin para olduğundan emin olabiliriz. Nesneler birbirine dokunmadığında bu işe yarar. Ama birbirine dokundukları için daha iyi bir seçenek, mesafe dönüşümünü bulmak ve uygun bir eşik uygulamaktır. Ardından kesinlikle para olmayan alanı bulmamız gerekiyor. Bunun için sonucu genişletiriz. Dilatasyon nesne sınırını arka plana doğru artırır:
# gürültü giderme
kernel = np.ones((3, 3), np.uint8)
opening = cv.morphologyEx(thresh, cv.MORPH_OPEN, kernel, iterations=2)
# kesin arka plan alanı
sure_bg = cv.dilate(opening, kernel, iterations=3)
# kesin ön plan alanı bulma
dist_transform = cv.distanceTransform(opening, cv.DIST_L2, 5)
ret, sure_fg = cv.threshold(dist_transform, 0.7 * dist_transform.max(), 255, 0)
# bilinmeyen bölgeyi bulma
sure_fg = np.uint8(sure_fg)
unknown = cv.subtract(sure_bg, sure_fg)Sonuca bakın:
Şimdi orijinal görüntüyle aynı boyutta ancak int32 veri tipinde bir işaretçi dizisi oluşturuyoruz. Bildiğimiz bölgeleri (ön plan veya arka plan) pozitif tamsayılarla etiketliyoruz; bilinmeyen bölgeleri ise 0 olarak bırakıyoruz. Bunun için cv.connectedComponents() kullanıyoruz:
# İşaretçi etiketleme
ret, markers = cv.connectedComponents(sure_fg)
# Kesin arka planın 0 değil 1 olması için tüm etiketlere 1 ekleyin
markers = markers + 1
# Bilinmeyen bölgeyi 0 ile işaretleyin
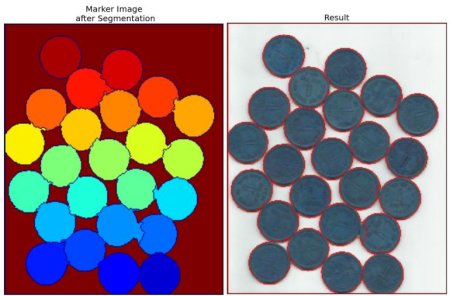
markers[unknown == 255] = 0JET renk haritasında gösterilen sonuç:
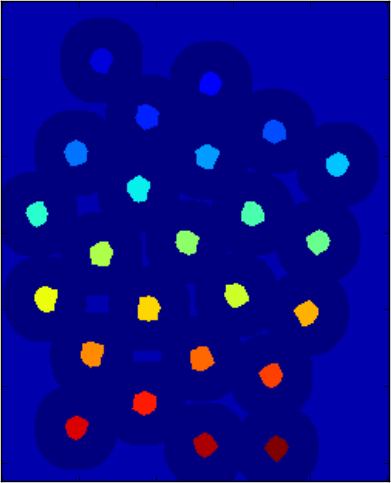
Koyu mavi bölge bilinmeyen bölgeyi göstermektedir. Kesin paralar farklı değerlerle renklendirilmiştir.
Şimdi işaretçimiz hazır. Watershed uygulamasının zamanı geldi. Sınır bölgesi -1 ile işaretlenecektir:
markers = cv.watershed(img, markers)
img[markers == -1] = [255, 0, 0]Sonuç:
Ek Kaynaklar
- CMM sayfası: Watershed Dönüşümü
Alıştırmalar
- OpenCV örnekleri, watershed.py adında etkileşimli bir Watershed segmentasyon örneği içerir. Çalıştırın, tadını çıkarın ve öğrenin.