· Hakan Çelik · OpenCV / Kamera Kalibrasyonu · 2 dk okuma
Stereo Görüntülerden Derinlik Haritası

OpenCV Serisi 49/64
- 1. Boya Fırçası Olarak Fare
- 2. Canny Kenar Algılama
- 3. Görüntü Geçişleri
- 4. Görüntü Piramitleri
- 5. Görüntülerde Aritmetik İşlemler
- 6. Görüntülerle İlgili Temel İşlemler
- 7. Görüntünün Geometrik Dönüşümleri
- 8. Görüntüyü Yumuşatma - ( Smoothing Images )
- 9. Histogramlar
- 10. Konturler ( Contours )
- 11. Morfolojik Dönüşümler
- 12. Opencv Nedir Ve Kurulumu
- 13. Opencv Resim Işlemleri
- 14. Opencv Video Işlemleri
- 15. Opencv'de Çizim Fonksiyonları
- 16. Performans Ölçüm Ve Geliştirme Teknikleri
- 17. Renk Alanlarını Değiştirme
- 18. Renk Paleti Olarak Parça Çubuğu ( Trackbar )
- 19. Resim Eşikleme
- 20. Şablon Eşleştirme
- 21. Hough Doğru Dönüşümü
- 22. Hough Daire Dönüşümü
- 23. Fourier Dönüşümü
- 24. Histogram Eşitleme
- 25. 2B Histogramlar
- 26. Histogram Geri Projeksiyonu
- 27. Kontur Özellikleri
- 28. Kontur Nitelikleri
- 29. Konturlerle Daha Fazla İşlev
- 30. Kontur Hiyerarşisi
- 31. GrabCut ile Etkileşimli Ön Plan Çıkarma
- 32. Watershed Algoritması ile Görüntü Segmentasyonu
- 33. Özellikleri Anlamak
- 34. Harris Köşe Tespiti
- 35. Shi-Tomasi Köşe Dedektörü ve İzlenecek İyi Özellikler
- 36. SIFT'e Giriş (Ölçek Değişmez Özellik Dönüşümü)
- 37. SURF'e Giriş (Hızlandırılmış Sağlam Özellikler)
- 38. Köşe Tespiti için FAST Algoritması
- 39. BRIEF — İkili Sağlam Bağımsız Temel Özellikler
- 40. ORB (Yönlü FAST ve Döndürülmüş BRIEF)
- 41. Özellik Eşleştirme
- 42. Özellik Eşleştirme + Nesneleri Bulmak için Homografi
- 43. Meanshift ve Camshift ile Nesne Takibi
- 44. Optik Akış
- 45. Arka Plan Çıkarma
- 46. Kamera Kalibrasyonu
- 47. Poz Tahmini
- 48. Epipolar Geometri
- 49. Stereo Görüntülerden Derinlik Haritası
- 50. k-En Yakın Komşuyu Anlamak
- 51. kNN ile El Yazısı OCR
- 52. SVM'yi Anlamak
- 53. SVM ile El Yazısı OCR
- 54. K-Ortalamalar Kümeleme'yi Anlamak
- 55. OpenCV'de K-Ortalamalar Kümeleme
- 56. Görüntü Gürültü Giderme
- 57. Görüntü Onarımı (Inpainting)
- 58. Yüksek Dinamik Aralık (HDR) Görüntüleme
- 59. Haar Cascade ile Yüz Tespiti
- 60. pip ile OpenCV Kurulumu
- 61. Ubuntu'da OpenCV-Python Kurulumu
- 62. Fedora'da OpenCV-Python Kurulumu
- 63. Windows'ta OpenCV-Python Kurulumu
- 64. OpenCV-Python Bağlayıcıları Nasıl Çalışır?
Stereo Görüntülerden Derinlik Haritası
Hedefler
Bu oturumda:
- Stereo görüntülerden derinlik haritası oluşturmayı öğreneceğiz
Temeller
Son oturumda epipolar kısıtlamalar ve ilgili terimler gibi temel kavramları gördük. Aynı sahnenin iki görüntüsüne sahipsek sezgisel bir şekilde derinlik bilgisi elde edebileceğimizi gördük. Aşağıdaki diyagram bu sezgiyi kanıtlayan eşdeğer üçgenler içermektedir:
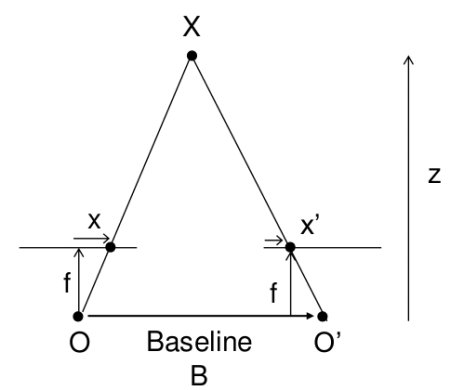
Diyagramdaki eşdeğer üçgenler şu sonucu verir:
disparite = x - x’ = Bf/Z
Burada x ve x’, 3D sahne noktasına karşılık gelen görüntü düzlemindeki noktalar ile kamera merkezleri arasındaki mesafelerdir. B iki kamera arasındaki mesafedir (bilinen), f ise kameranın odak uzunluğudur (zaten bilinen). Yani bir sahnedeki noktanın derinliği, karşılıklı görüntü noktaları ve kamera merkezleri arasındaki mesafe farkıyla ters orantılıdır.
Kod
Aşağıdaki kod parçacığı, bir disparite haritası oluşturmak için basit bir prosedür göstermektedir:
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
imgL = cv.imread('tsukuba_l.png', cv.IMREAD_GRAYSCALE)
imgR = cv.imread('tsukuba_r.png', cv.IMREAD_GRAYSCALE)
stereo = cv.StereoBM.create(numDisparities=16, blockSize=15)
disparity = stereo.compute(imgL, imgR)
plt.imshow(disparity, 'gray')
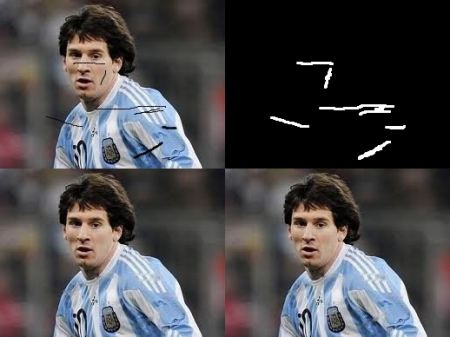
plt.show()Aşağıdaki görüntü orijinal görüntüyü (sol) ve disparite haritasını (sağ) içermektedir:
Sonucun yüksek derecede gürültüyle kirlendiğini görebilirsiniz. numDisparities ve blockSize değerlerini ayarlayarak daha iyi bir sonuç elde edebilirsiniz.
StereoBM ile bazı ayarlanabilir parametreler:
- texture_threshold — Güvenilir eşleştirme için yeterli doku içermeyen alanları filtreler
- Speckle aralığı ve boyutu — Blok tabanlı eşleştiriciler genellikle nesne sınırları yakınında “leke” oluşturur; bu parametreler disparity görüntüsüne bir leke filtresi uygular
- numDisparities — Pencerenin kaç piksel kaydırılacağı. Büyükse daha geniş görünür derinlik aralığı sağlar
- min_disparity — Aramanın başladığı x konumundan ofset
- uniqueness_ratio — En iyi eşleşen disparite yeterince iyi değilse piksel filtrelenir
Ek Kaynaklar
Alıştırmalar
- OpenCV örnekleri, disparite haritası oluşturma ve 3D yeniden yapılandırma örneği içerir. OpenCV-Python örneklerindeki stereo_match.py’yi inceleyin.