· Hakan Çelik · OpenCV / Kamera Kalibrasyonu · 3 dk okuma
Kamera Kalibrasyonu
OpenCV Serisi 46/64
- 1. Boya Fırçası Olarak Fare
- 2. Canny Kenar Algılama
- 3. Görüntü Geçişleri
- 4. Görüntü Piramitleri
- 5. Görüntülerde Aritmetik İşlemler
- 6. Görüntülerle İlgili Temel İşlemler
- 7. Görüntünün Geometrik Dönüşümleri
- 8. Görüntüyü Yumuşatma - ( Smoothing Images )
- 9. Histogramlar
- 10. Konturler ( Contours )
- 11. Morfolojik Dönüşümler
- 12. Opencv Nedir Ve Kurulumu
- 13. Opencv Resim Işlemleri
- 14. Opencv Video Işlemleri
- 15. Opencv'de Çizim Fonksiyonları
- 16. Performans Ölçüm Ve Geliştirme Teknikleri
- 17. Renk Alanlarını Değiştirme
- 18. Renk Paleti Olarak Parça Çubuğu ( Trackbar )
- 19. Resim Eşikleme
- 20. Şablon Eşleştirme
- 21. Hough Doğru Dönüşümü
- 22. Hough Daire Dönüşümü
- 23. Fourier Dönüşümü
- 24. Histogram Eşitleme
- 25. 2B Histogramlar
- 26. Histogram Geri Projeksiyonu
- 27. Kontur Özellikleri
- 28. Kontur Nitelikleri
- 29. Konturlerle Daha Fazla İşlev
- 30. Kontur Hiyerarşisi
- 31. GrabCut ile Etkileşimli Ön Plan Çıkarma
- 32. Watershed Algoritması ile Görüntü Segmentasyonu
- 33. Özellikleri Anlamak
- 34. Harris Köşe Tespiti
- 35. Shi-Tomasi Köşe Dedektörü ve İzlenecek İyi Özellikler
- 36. SIFT'e Giriş (Ölçek Değişmez Özellik Dönüşümü)
- 37. SURF'e Giriş (Hızlandırılmış Sağlam Özellikler)
- 38. Köşe Tespiti için FAST Algoritması
- 39. BRIEF — İkili Sağlam Bağımsız Temel Özellikler
- 40. ORB (Yönlü FAST ve Döndürülmüş BRIEF)
- 41. Özellik Eşleştirme
- 42. Özellik Eşleştirme + Nesneleri Bulmak için Homografi
- 43. Meanshift ve Camshift ile Nesne Takibi
- 44. Optik Akış
- 45. Arka Plan Çıkarma
- 46. Kamera Kalibrasyonu
- 47. Poz Tahmini
- 48. Epipolar Geometri
- 49. Stereo Görüntülerden Derinlik Haritası
- 50. k-En Yakın Komşuyu Anlamak
- 51. kNN ile El Yazısı OCR
- 52. SVM'yi Anlamak
- 53. SVM ile El Yazısı OCR
- 54. K-Ortalamalar Kümeleme'yi Anlamak
- 55. OpenCV'de K-Ortalamalar Kümeleme
- 56. Görüntü Gürültü Giderme
- 57. Görüntü Onarımı (Inpainting)
- 58. Yüksek Dinamik Aralık (HDR) Görüntüleme
- 59. Haar Cascade ile Yüz Tespiti
- 60. pip ile OpenCV Kurulumu
- 61. Ubuntu'da OpenCV-Python Kurulumu
- 62. Fedora'da OpenCV-Python Kurulumu
- 63. Windows'ta OpenCV-Python Kurulumu
- 64. OpenCV-Python Bağlayıcıları Nasıl Çalışır?
Kamera Kalibrasyonu
Hedefler
Bu bölümde:
- Kameraların neden olduğu bozulma türlerini öğreneceğiz
- Kameranın iç ve dış parametrelerini nasıl bulacağımızı öğreneceğiz
- Bu parametrelere dayanarak görüntüleri nasıl düzelteceğimizi öğreneceğiz
Temeller
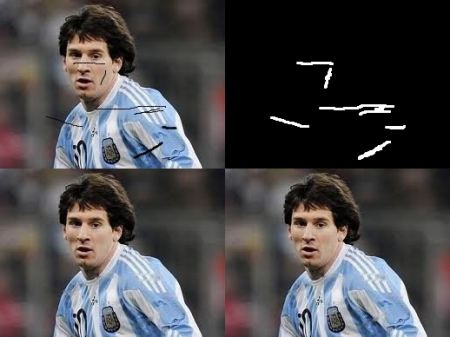
Bazı delikli kameralar görüntülere önemli bozulmalar ekler. İki ana bozulma türü vardır: radyal bozulma ve teğetsel bozulma.
Radyal bozulma, düz çizgilerin eğri görünmesine neden olur. Görüntünün merkezinden uzaklaştıkça daha fazla radyal bozulma olur:
Radyal bozulma şu şekilde temsil edilebilir:
x_bozulmus = x(1 + k₁r² + k₂r⁴ + k₃r⁶) y_bozulmus = y(1 + k₁r² + k₂r⁴ + k₃r⁶)
Teğetsel bozulma, görüntü çekme merceği görüntüleme düzlemine tam olarak paralel hizalanmadığında ortaya çıkar:
x_bozulmus = x + [2p₁xy + p₂(r² + 2x²)] y_bozulmus = y + [p₁(r² + 2y²) + 2p₂xy]
Kısa özetle, beş bozulma katsayısını bulmamız gerekir: (k₁, k₂, p₁, p₂, k₃)
Bunlara ek olarak, odak uzunlukları (fx, fy) ve optik merkezler (cx, cy) gibi bilgileri içeren iç parametreler gereklidir. Kamera matrisi şu 3×3 matris olarak ifade edilir:
kamera_matrisi = [[fx, 0, cx],
[0, fy, cy],
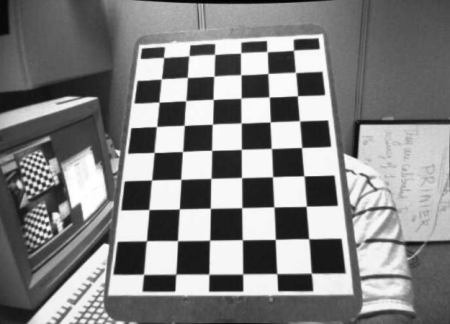
[0, 0, 1]]Kamera matrisine erişmek için iyi tanımlanmış bir desen (örneğin satranç tahtası) içeren bazı örnek görüntüler sağlamalıyız. Gerçek dünya uzayındaki koordinatlarını ve görüntüdeki koordinatlarını bildiğimiz noktalar üzerinden bozulma katsayılarını çözebiliriz. Daha iyi sonuçlar için en az 10 test deseni gereklidir.
Kod
import numpy as np
import cv2 as cv
import glob
# Sonlandırma kriterleri
criteria = (cv.TERM_CRITERIA_EPS + cv.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# Nesne noktalarını hazırla (0,0,0), (1,0,0), (2,0,0) ..., (6,5,0)
objp = np.zeros((6 * 7, 3), np.float32)
objp[:, :2] = np.mgrid[0:7, 0:6].T.reshape(-1, 2)
# Tüm görüntülerden nesne noktaları ve görüntü noktalarını saklayacak diziler
objpoints = [] # 3D gerçek dünya noktaları
imgpoints = [] # 2D görüntü düzlemi noktaları
images = glob.glob('*.jpg')
for fname in images:
img = cv.imread(fname)
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# Satranç tahtası köşelerini bul
ret, corners = cv.findChessboardCorners(gray, (7, 6), None)
# Bulunursa, nesne noktaları ve görüntü noktaları ekle
if ret == True:
objpoints.append(objp)
corners2 = cv.cornerSubPix(gray, corners, (11, 11), (-1, -1), criteria)
imgpoints.append(corners2)
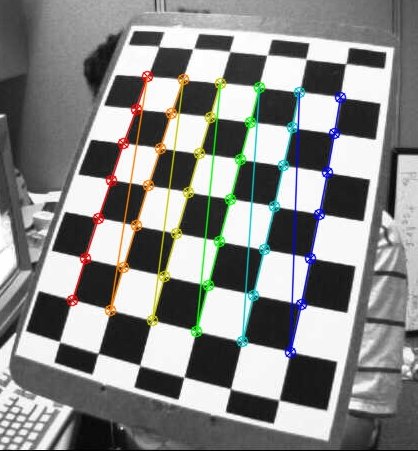
# Köşeleri çiz ve göster
cv.drawChessboardCorners(img, (7, 6), corners2, ret)
cv.imshow('img', img)
cv.waitKey(500)
cv.destroyAllWindows()Desen üzerine çizilmiş bir görüntü:
Kalibrasyon
Nesne noktaları ve görüntü noktalarımız hazır. Kalibrasyon için kamera matrisini, bozulma katsayılarını, dönme ve öteleme vektörlerini döndüren cv.calibrateCamera() fonksiyonunu kullanırız:
ret, mtx, dist, rvecs, tvecs = cv.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)Bozulmayı Giderme
Yöntem 1: cv.undistort() kullanarak
img = cv.imread('left12.jpg')
h, w = img.shape[:2]
newcameramtx, roi = cv.getOptimalNewCameraMatrix(mtx, dist, (w, h), 1, (w, h))
# Bozulmayı gider
dst = cv.undistort(img, mtx, dist, None, newcameramtx)
# Görüntüyü kırp
x, y, w, h = roi
dst = dst[y:y + h, x:x + w]
cv.imwrite('calibresult.png', dst)Yöntem 2: Yeniden Eşleme kullanarak
mapx, mapy = cv.initUndistortRectifyMap(mtx, dist, None, newcameramtx, (w, h), 5)
dst = cv.remap(img, mapx, mapy, cv.INTER_LINEAR)
x, y, w, h = roi
dst = dst[y:y + h, x:x + w]
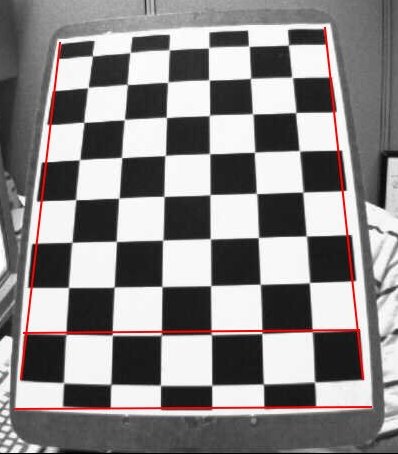
cv.imwrite('calibresult.png', dst)Her iki yöntem de aynı sonucu verir:
Tüm kenarların düz olduğunu görebilirsiniz.
Yeniden Projeksiyon Hatası
Yeniden projeksiyon hatası, bulunan parametrelerin ne kadar doğru olduğu hakkında iyi bir tahmin sağlar:
mean_error = 0
for i in range(len(objpoints)):
imgpoints2, _ = cv.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist)
error = cv.norm(imgpoints[i], imgpoints2, cv.NORM_L2SQR) / len(imgpoints2)
mean_error += error
print("toplam hata: {}".format(np.sqrt(mean_error / len(objpoints))))Alıştırmalar
- Dairesel ızgara ile kamera kalibrasyonunu deneyin.