· Hakan Çelik · OpenCV / Hesaplamalı Fotoğrafçılık · 3 dk okuma
Yüksek Dinamik Aralık (HDR) Görüntüleme

OpenCV Serisi 58/64
- 1. Boya Fırçası Olarak Fare
- 2. Canny Kenar Algılama
- 3. Görüntü Geçişleri
- 4. Görüntü Piramitleri
- 5. Görüntülerde Aritmetik İşlemler
- 6. Görüntülerle İlgili Temel İşlemler
- 7. Görüntünün Geometrik Dönüşümleri
- 8. Görüntüyü Yumuşatma - ( Smoothing Images )
- 9. Histogramlar
- 10. Konturler ( Contours )
- 11. Morfolojik Dönüşümler
- 12. Opencv Nedir Ve Kurulumu
- 13. Opencv Resim Işlemleri
- 14. Opencv Video Işlemleri
- 15. Opencv'de Çizim Fonksiyonları
- 16. Performans Ölçüm Ve Geliştirme Teknikleri
- 17. Renk Alanlarını Değiştirme
- 18. Renk Paleti Olarak Parça Çubuğu ( Trackbar )
- 19. Resim Eşikleme
- 20. Şablon Eşleştirme
- 21. Hough Doğru Dönüşümü
- 22. Hough Daire Dönüşümü
- 23. Fourier Dönüşümü
- 24. Histogram Eşitleme
- 25. 2B Histogramlar
- 26. Histogram Geri Projeksiyonu
- 27. Kontur Özellikleri
- 28. Kontur Nitelikleri
- 29. Konturlerle Daha Fazla İşlev
- 30. Kontur Hiyerarşisi
- 31. GrabCut ile Etkileşimli Ön Plan Çıkarma
- 32. Watershed Algoritması ile Görüntü Segmentasyonu
- 33. Özellikleri Anlamak
- 34. Harris Köşe Tespiti
- 35. Shi-Tomasi Köşe Dedektörü ve İzlenecek İyi Özellikler
- 36. SIFT'e Giriş (Ölçek Değişmez Özellik Dönüşümü)
- 37. SURF'e Giriş (Hızlandırılmış Sağlam Özellikler)
- 38. Köşe Tespiti için FAST Algoritması
- 39. BRIEF — İkili Sağlam Bağımsız Temel Özellikler
- 40. ORB (Yönlü FAST ve Döndürülmüş BRIEF)
- 41. Özellik Eşleştirme
- 42. Özellik Eşleştirme + Nesneleri Bulmak için Homografi
- 43. Meanshift ve Camshift ile Nesne Takibi
- 44. Optik Akış
- 45. Arka Plan Çıkarma
- 46. Kamera Kalibrasyonu
- 47. Poz Tahmini
- 48. Epipolar Geometri
- 49. Stereo Görüntülerden Derinlik Haritası
- 50. k-En Yakın Komşuyu Anlamak
- 51. kNN ile El Yazısı OCR
- 52. SVM'yi Anlamak
- 53. SVM ile El Yazısı OCR
- 54. K-Ortalamalar Kümeleme'yi Anlamak
- 55. OpenCV'de K-Ortalamalar Kümeleme
- 56. Görüntü Gürültü Giderme
- 57. Görüntü Onarımı (Inpainting)
- 58. Yüksek Dinamik Aralık (HDR) Görüntüleme
- 59. Haar Cascade ile Yüz Tespiti
- 60. pip ile OpenCV Kurulumu
- 61. Ubuntu'da OpenCV-Python Kurulumu
- 62. Fedora'da OpenCV-Python Kurulumu
- 63. Windows'ta OpenCV-Python Kurulumu
- 64. OpenCV-Python Bağlayıcıları Nasıl Çalışır?
Yüksek Dinamik Aralık (HDR) Görüntüleme
Hedefler
- Pozlama dizisinden HDR görüntü oluşturmayı ve görüntülemeyi öğreneceğiz
- Pozlama dizisini birleştirmek için exposure fusion kullanacağız
Teori
Yüksek Dinamik Aralık Görüntüleme (HDRI veya HDR), standart dijital görüntüleme veya fotoğrafçılık tekniklerinden daha geniş bir parlaklık dinamik aralığını yeniden üretmek için kullanılan bir tekniktir. İnsan gözü geniş bir ışık koşulları yelpazesine uyum sağlayabilirken, çoğu görüntüleme cihazı kanal başına 8 bit kullanır ve yalnızca 256 seviyeyle sınırlıdır.
Gerçek dünya sahnelerinin fotoğraflarını çekerken parlak bölgeler aşırı pozlanabilir, karanlık bölgeler ise az pozlanabilir. HDR görüntüleme, kanal başına 8 bitten fazla (genellikle 32 bit float değerler) kullanan görüntülerle çalışır ve çok daha geniş bir dinamik aralıka olanak tanır.
HDR görüntü elde etmenin en yaygın yolu, farklı pozlama değerleriyle çekilen fotoğrafları kullanmaktır. Bu pozlamaları birleştirmek için kameranın yanıt fonksiyonunu bilmek faydalıdır. HDR görüntü oluşturulduktan sonra normal ekranlarda görüntülemek için 8 bit’e dönüştürülmesi gerekir; bu işleme tonemapping denir.
Bu öğreticide iki algoritma (Debevec, Robertson) kullanarak pozlama dizisinden HDR görüntü oluşturmayı ve HDR verisi gerektirmeyen bir alternatif olan exposure fusion (Mertens) yaklaşımını göstereceğiz.
Pozlama Dizisiyle HDR
15, 2.5, 1/4 ve 1/30 saniyelik pozlama sürelerine sahip 4 fotoğraftan oluşan sahneye bakacağız:

1. Pozlama görüntülerini listeye yükleme
İlk aşama tüm görüntüleri bir listeye yüklemektir. Normal HDR algoritmaları için pozlama sürelerine de ihtiyacımız var. Görüntüler 8 bit (np.uint8), pozlama süreleri float32 ve saniye cinsinden olmalıdır:
import cv2 as cv
import numpy as np
# Pozlama görüntülerini listeye yükle
img_fn = ["img0.jpg", "img1.jpg", "img2.jpg", "img3.jpg"]
img_list = [cv.imread(fn) for fn in img_fn]
exposure_times = np.array([15.0, 2.5, 0.25, 0.0333], dtype=np.float32)2. Pozlamaları HDR görüntüde birleştirme
İki yöntem sunuyoruz: Debevec ve Robertson. HDR görüntüsü uint8 değil float32 tipindedir:
# Pozlamaları HDR görüntüde birleştir
merge_debevec = cv.createMergeDebevec()
hdr_debevec = merge_debevec.process(img_list, times=exposure_times.copy())
merge_robertson = cv.createMergeRobertson()
hdr_robertson = merge_robertson.process(img_list, times=exposure_times.copy())3. HDR görüntüyü tonemapping ile dönüştürme
32 bit float HDR verisini [0..1] aralığına eşliyoruz:
# Gamma düzeltmesi ile tonemapping (standart ekran parlaklığı için gamma=2.2)
tonemap1 = cv.createTonemap(gamma=2.2)
res_debevec = tonemap1.process(hdr_debevec.copy())
res_robertson = tonemap1.process(hdr_robertson.copy())4. Mertens füzyonu ile pozlamaları birleştirme
Pozlama sürelerine ihtiyaç duymayan alternatif bir algoritma. Mertens algoritması zaten [0..1] aralığında sonuç verir, tonemapping gerekmez:
# Mertens ile exposure fusion
merge_mertens = cv.createMergeMertens()
res_mertens = merge_mertens.process(img_list)5. 8 bit’e dönüştürme ve kaydetme
# 8 bit'e dönüştür ve kaydet
res_debevec_8bit = np.clip(res_debevec * 255, 0, 255).astype('uint8')
res_robertson_8bit = np.clip(res_robertson * 255, 0, 255).astype('uint8')
res_mertens_8bit = np.clip(res_mertens * 255, 0, 255).astype('uint8')
cv.imwrite("ldr_debevec.jpg", res_debevec_8bit)
cv.imwrite("ldr_robertson.jpg", res_robertson_8bit)
cv.imwrite("fusion_mertens.jpg", res_mertens_8bit)Sonuçlar
Her algoritmanın sonuçlarını görebilirsiniz. Her algoritmanın istenilen sonucu elde etmek için ayarlanabilir ek parametreler olduğunu unutmayın.
Debevec:
Robertson:

Mertens Füzyonu:

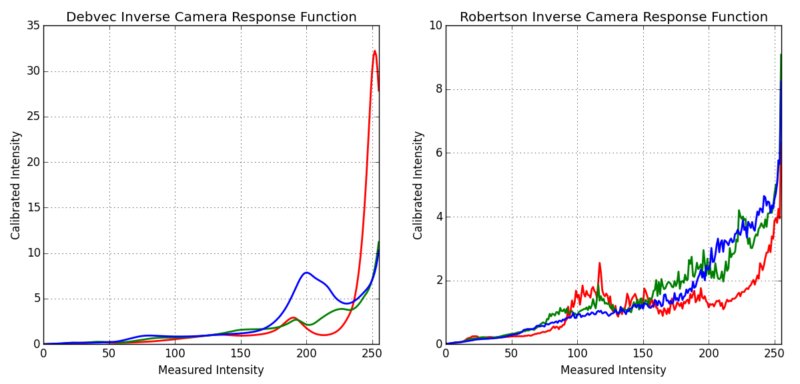
Kamera Yanıt Fonksiyonunu Tahmin Etme
Kamera yanıt fonksiyonu (CRF), sahne radyansı ile ölçülen yoğunluk değerleri arasındaki bağlantıyı verir. Ters kamera yanıt fonksiyonunu tahmin edip HDR birleştirme için kullanabiliriz:
# Kamera yanıt fonksiyonunu tahmin et (CRF)
cal_debevec = cv.createCalibrateDebevec()
crf_debevec = cal_debevec.process(img_list, times=exposure_times)
hdr_debevec = merge_debevec.process(img_list, times=exposure_times.copy(), response=crf_debevec.copy())
cal_robertson = cv.createCalibrateRobertson()
crf_robertson = cal_robertson.process(img_list, times=exposure_times)
hdr_robertson = merge_robertson.process(img_list, times=exposure_times.copy(), response=crf_robertson.copy())Kamera yanıt fonksiyonu her renk kanalı için 256 uzunluklu bir vektörle temsil edilir: