· Hakan Çelik · OpenCV / Hesaplamalı Fotoğrafçılık · 3 dk okuma
Görüntü Gürültü Giderme
OpenCV Serisi 56/64
- 1. Boya Fırçası Olarak Fare
- 2. Canny Kenar Algılama
- 3. Görüntü Geçişleri
- 4. Görüntü Piramitleri
- 5. Görüntülerde Aritmetik İşlemler
- 6. Görüntülerle İlgili Temel İşlemler
- 7. Görüntünün Geometrik Dönüşümleri
- 8. Görüntüyü Yumuşatma - ( Smoothing Images )
- 9. Histogramlar
- 10. Konturler ( Contours )
- 11. Morfolojik Dönüşümler
- 12. Opencv Nedir Ve Kurulumu
- 13. Opencv Resim Işlemleri
- 14. Opencv Video Işlemleri
- 15. Opencv'de Çizim Fonksiyonları
- 16. Performans Ölçüm Ve Geliştirme Teknikleri
- 17. Renk Alanlarını Değiştirme
- 18. Renk Paleti Olarak Parça Çubuğu ( Trackbar )
- 19. Resim Eşikleme
- 20. Şablon Eşleştirme
- 21. Hough Doğru Dönüşümü
- 22. Hough Daire Dönüşümü
- 23. Fourier Dönüşümü
- 24. Histogram Eşitleme
- 25. 2B Histogramlar
- 26. Histogram Geri Projeksiyonu
- 27. Kontur Özellikleri
- 28. Kontur Nitelikleri
- 29. Konturlerle Daha Fazla İşlev
- 30. Kontur Hiyerarşisi
- 31. GrabCut ile Etkileşimli Ön Plan Çıkarma
- 32. Watershed Algoritması ile Görüntü Segmentasyonu
- 33. Özellikleri Anlamak
- 34. Harris Köşe Tespiti
- 35. Shi-Tomasi Köşe Dedektörü ve İzlenecek İyi Özellikler
- 36. SIFT'e Giriş (Ölçek Değişmez Özellik Dönüşümü)
- 37. SURF'e Giriş (Hızlandırılmış Sağlam Özellikler)
- 38. Köşe Tespiti için FAST Algoritması
- 39. BRIEF — İkili Sağlam Bağımsız Temel Özellikler
- 40. ORB (Yönlü FAST ve Döndürülmüş BRIEF)
- 41. Özellik Eşleştirme
- 42. Özellik Eşleştirme + Nesneleri Bulmak için Homografi
- 43. Meanshift ve Camshift ile Nesne Takibi
- 44. Optik Akış
- 45. Arka Plan Çıkarma
- 46. Kamera Kalibrasyonu
- 47. Poz Tahmini
- 48. Epipolar Geometri
- 49. Stereo Görüntülerden Derinlik Haritası
- 50. k-En Yakın Komşuyu Anlamak
- 51. kNN ile El Yazısı OCR
- 52. SVM'yi Anlamak
- 53. SVM ile El Yazısı OCR
- 54. K-Ortalamalar Kümeleme'yi Anlamak
- 55. OpenCV'de K-Ortalamalar Kümeleme
- 56. Görüntü Gürültü Giderme
- 57. Görüntü Onarımı (Inpainting)
- 58. Yüksek Dinamik Aralık (HDR) Görüntüleme
- 59. Haar Cascade ile Yüz Tespiti
- 60. pip ile OpenCV Kurulumu
- 61. Ubuntu'da OpenCV-Python Kurulumu
- 62. Fedora'da OpenCV-Python Kurulumu
- 63. Windows'ta OpenCV-Python Kurulumu
- 64. OpenCV-Python Bağlayıcıları Nasıl Çalışır?
Görüntü Gürültü Giderme
Hedefler
- Görüntüdeki gürültüyü kaldırmak için Non-Local Means Denoising algoritmasını öğreneceğiz
- cv.fastNlMeansDenoising(), cv.fastNlMeansDenoisingColored() gibi fonksiyonları inceleyeceğiz
Teori
Önceki bölümlerde Gauss Bulanıklaştırma, Medyan Bulanıklaştırma gibi pek çok görüntü düzleştirme tekniği gördük. Bu teknikler küçük miktarlardaki gürültüyü belirli ölçüde kaldırmak için iyiydi. Söz konusu tekniklerde pikselin etrafındaki küçük bir komşuluğu alarak gauss ağırlıklı ortalama, medyan gibi işlemler yapıp merkez elemanı değiştiriyorduk. Kısacası gürültü giderme, pikselin yerel komşuluğunda gerçekleşiyordu.
Gürültünün bir özelliği vardır: Gürültü genellikle sıfır ortalamaya sahip rastgele bir değişken kabul edilir. Gürültülü bir piksel düşünün: p = p0 + n — burada p0 pikselin gerçek değeri, n ise gürültüdür. Farklı görüntülerden aynı pikselin çok sayıda (N tane) örneğini alıp ortalamasını hesaplarsanız, gürültünün ortalaması sıfır olduğundan p = p0 elde edersiniz.
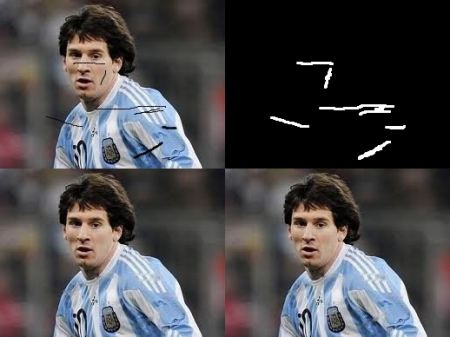
Fikir basit: Gürültüyü ortalamayla gidermek için benzer görüntülere ihtiyacımız var. Görüntüde küçük bir pencere (5x5 gibi) düşünün. Aynı yama görüntünün başka bir yerinde de bulunabilir. Bu benzer yamalar bir araya getirilerek ortalamaları alınırsa o piksel değiştirilir. Buna Non-Local Means Denoising denir.
Görüntüdeki mavi yamalar birbirine benziyor, yeşil yamalar da birbirine benziyor. Bir piksel alınır, etrafında küçük bir pencere oluşturulur, görüntüde benzer pencereler aranır, tüm pencereler ortalaması alınır ve piksel bu sonuçla değiştirilir. Bu yöntem daha önce gördüğümüz bulanıklaştırma tekniklerinden daha fazla zaman alır, ancak sonuçları çok iyidir.
Renkli görüntüler için görüntü CIELAB renk uzayına dönüştürülür, ardından L ve AB bileşenleri ayrı ayrı gürültü giderilir.
OpenCV’de Görüntü Gürültü Giderme
OpenCV bu tekniğin dört çeşidini sağlar:
- cv.fastNlMeansDenoising() — tek gri tonlamalı görüntüyle çalışır
- cv.fastNlMeansDenoisingColored() — renkli görüntüyle çalışır
- cv.fastNlMeansDenoisingMulti() — kısa sürede çekilen görüntü dizisiyle çalışır (gri tonlamalı)
- cv.fastNlMeansDenoisingColoredMulti() — yukarıdakiyle aynı, renkli görüntüler için
Ortak parametreler:
- h: Filtre gücünü belirler. Yüksek h değeri gürültüyü daha iyi giderir ama görüntü detaylarını da kaybeder (10 iyidir)
- hForColorComponents: Yalnızca renkli görüntüler için h ile aynı (genellikle h ile aynı)
- templateWindowSize: Tek sayı olmalı (7 önerilir)
- searchWindowSize: Tek sayı olmalı (21 önerilir)
1. cv.fastNlMeansDenoisingColored()
Renkli görüntülerden gürültü kaldırmak için kullanılır (Gauss gürültüsü beklenir):
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
img = cv.imread('die.png')
dst = cv.fastNlMeansDenoisingColored(img, None, 10, 10, 7, 21)
plt.subplot(121), plt.imshow(img)
plt.subplot(122), plt.imshow(dst)
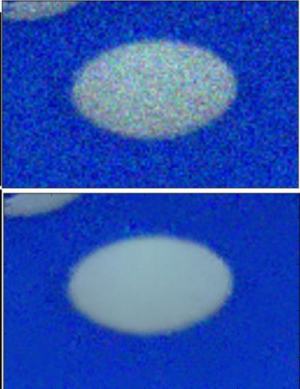
plt.show()Aşağıda sigma=25 Gauss gürültüsüyle bozulmuş giriş görüntüsünün büyütülmüş sonucu:
2. cv.fastNlMeansDenoisingMulti()
Aynı yöntemi bir videoya uygulayalım. İlk argüman gürültülü kareler listesi, ikinci argüman imgToDenoiseIndex gürültü gidereceğimiz kareyi belirtir, üçüncüsü temporalWindowSize gürültü giderme için kullanılacak komşu kare sayısıdır (tek sayı olmalı):
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
cap = cv.VideoCapture('vtest.avi')
# İlk 5 kareyi listeye al
img = [cap.read()[1] for i in range(5)]
# Tümünü gri tonlamaya çevir
gray = [cv.cvtColor(i, cv.COLOR_BGR2GRAY) for i in img]
# float64'e dönüştür
gray = [np.float64(i) for i in gray]
# Varyansı 25 olan gürültü oluştur
noise = np.random.randn(*gray[1].shape) * 10
# Gürültüyü görüntülere ekle
noisy = [i + noise for i in gray]
# uint8'e geri dönüştür
noisy = [np.uint8(np.clip(i, 0, 255)) for i in noisy]
# 3. kareyi, 5 kareyi dikkate alarak gürültü gider
dst = cv.fastNlMeansDenoisingMulti(noisy, 2, 5, None, 4, 7, 35)
plt.subplot(131), plt.imshow(gray[2], 'gray')
plt.subplot(132), plt.imshow(noisy[2], 'gray')
plt.subplot(133), plt.imshow(dst, 'gray')
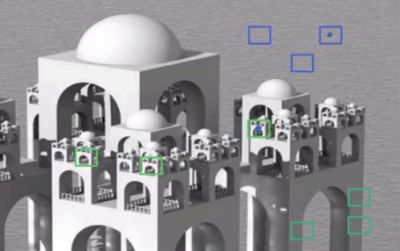
plt.show()Elde edilen sonucun büyütülmüş görünümü:

Hesaplama için önemli miktarda zaman gerektirir. Sonuçta: ilk görüntü orijinal kare, ikincisi gürültülü kare, üçüncüsü gürültü giderilmiş görüntü.